
História družicových systémov sa začala odvíjať už koncom 70. rokov, ale až v posledných niekoľkých rokoch sa tieto systémy dostávajú do povedomia širšej verejnosti.
Zmeny, ku ktorým v poslednej dobe došlo v oblasti praktického využívania družicových polohových systémov, (pre ktoré sa v poslednej dobe začína používať obecnejší termín "globálne navigačné družicové systémy") sú značné.
Pôvodne bolo využitie systému len pre armádu a pre meračské potreby, avšak v poslednej dobe sa začalo rozvíjať i jeho využívanie pre účely,
pre ktorý bol pôvodne určený, tj. pre sledovanie polohy a pre navigáciu dopravných prostriedkov a tiež najmodernejších zbraní. Všetky spôsoby využitia smerujú k získavaniu priestorových dát (polohy v čase), a
to buď statických alebo dynamických.
Globálny polohový systém (skr. GPS, z angl. Global Positioning system) je družicový systém pre stanovovanie polohy a času na zemskom povrchu a v priľahlom priestore.
Je schopný poskytovať tieto údaje nezávisle na počasí a 24 hodín denne.
Družice vysielajú signály, ktoré sú príjímané príjímačmi a spracované pre meračské alebo navigačné účely. Presnosť stanovenia horizontálnej polohy sa pohybuje v rozmedzí od + 100 m až po + niekoľko cm.
GPS slúži na pozemnú, námornú i leteckú navigácii, na meračské účely, geofyzikálne výskumy, mapovanie, na navádzania vozidiel a na celý rad iných činností.
Využitie GPS v geodézii:
V porovnaní s bežnými meračskými technikami vykazuje GPS mnoho výhod:Má však i nevýhody:
Má niektoré významné odlišnosti:
História družicových polohových systémov
Už niekoľko tisícročí vyvíjali ľudia spôsoby, ako dopraviť na veľké vzdialenosti bezpečne a čo najrýchlejšie svoje dopravné prostriedky. Spočiatku používali uhlovú navigáciu podľa hviezd, neskôr, s nástupom rádiového vysielania, začali používať rádiomajáky (napr. systémy Loran a Omega). Potom sa objavili umelé družice Zeme, ktoré umožnili vyvinúť omnoho presnejšie navigačné systémy. Prvý takýto navigačný systém uviedli do prevádzky Spojené Štáty Americké v 60. rokoch a dostal meno Transit. Začiatkom 70. rokov potom opäť v USA začal vznikať projekt, zameraný na ďalšie zdokonalenie družicovej navigácie - začal vznikať plán na vybudovanie systému, ktorý by umožňoval stanovovať polohu s presnosťou až na milimetre. I keď jeho praktická a plne funkčná realizácia trvala viac než 20 rokov, vznikol unikátny systém, ktorý umožňuje prakticky komukoľvek na svete stanoviť svoju polohu s presnosťou, ktorá nie je horšia ako 100 metrov.
Dopplerovské systémy
O využití družíc pre potreby navigácie sa začalo uvažovať koncom 50. rokov - prakticky ihneď po vypustení prvej vesmírnej družice. Prvý rutinne pracujúci systém uviedli do prevádzky USA v 60. rokoch. Jednalo sa o systém Transit, tvorený šiestimi družicami, obiehajúcich po polárnej obežnej dráhe vo výške cca 1075 km a tromi pozorovacími stanicami umiestnenými na území USA. Obežná doba družíc bola 107 min a družice boli v priestore rozmiestnené tak, že z ktoréhokoľvek miesta na zemeguli bola viditeľná aspoň jedna družica každých 35 až 100 minút. Vždy keď sa objavila družica nad obzorom, mohol pozorovateľ zistiť svoju polohu spracovaním signálov prijatých z družice. Pôvodný systém umožňoval získať polohu s presnosťou na cca 800 m (pol míle), ale postupné zdokonaľovanie techniky i vyhodnocovacých postupov viedlo k dosiahnutiu presnosti pod 5 metrov. Hlavným zdrojom chýb u tohto systému bola nepresnosť údajov o obežných dráhach družíc (tzv. efemerid). Preto bol vyvinutý spôsob merania, kde jedna stanica bola umiestnená na bode so známou polohou, z nameraných signálov boli spočítané korekcie efemerid a tie bolo potom možné použiť pre korekciu výpočtov v okruhu cca 100-500 km. Výsledná presnosť potom bola lepšia než 1 m. Nevýhodou tohto systému bolo jednak to, že pozorovateľ musel zavádzať do výpočtov polohy korekcie na vlastnú rýchlosť a jednak to, že výsledné súradnice boli len dvojrozmerné. Preto nebolo možné tento systém využiť pre leteckú navigáciu. Ďalšou nevýhodou bola len občasná dostupnosť signálu. Tento systém bol pôvodne vyvinutý pre potreby ponorkového loďstva, ale postupne sa rozšírilo i jeho komerčné využitie pre námornú navigáciu. Systém je dodnes funkčný, ale už sa neobnovuje a počíta sa s jeho postupným zánikom. Skúsenosti získané pri vývoji a prevádzkovaní tohto systému boli veľmi užitočné práve pri vývoji neskoršieho systému GPS. V roku 1972 bol uvedený do života ďalší systém, ktorý dostal názov Timotion a bol zameraný na vysielanie presného časového signálu. Tento projekt bol taktiež zdrojom skúseností pre neskorší projekt GPS (tretia z radu družíc bola použitá práve pre demonštráciu technológie GPS). Obdobný vývoj prebiehal i v bývalom Sovietskom Zväze. Koncom 60. rokov bol uvedený do prevádzky Dopplerovský navigačný systém, označovaný názvom Cyklon a dodnes sú používané ďalšie dva obdobné systémy - vojenský šesťdružicový s názvom Parus (alebo tiež Cikada-M) a civilný štvor družicový s názvom Cikada. Tieto systémy majú rovnaké nevýhody ako americký Transit - len dvojrozmerné súradnice, s presnosťou 500 m pri príjme signálu len z jednej družice a zlý časový signál.
 Na základe dobrých skúseností s dopplerovskými systémami družicovej navigácie bol na počiatku sedemdesiatych rokoch len kúsok k myšlienke vybudovať celkom nový družicový systém, ktorý by umožňoval stanovenie polohy v trojrozmernom priestore spolu s presným časom a sprístupnil by tak družicovú navigáciu i letectvu. Definitívne rozhodnutie o vybudovaní tohto systému padlo 17. Decembra 1973. Od svojho prvopočiatku nesie systém dva názvy GPS a NAVSTAR. Názov NAVSTAR sa niekedy vydáva za skratku názvu NAVigation System with Time And Ranging, ale sám autor projektu sa nad tým len usmieva - tento druhý názov nemá žiadny význam, bol používaný len preto, aby bolo vyhovené vysokému úradníkovi na ministerstve obrany, ktorý rozhodoval o prideľovaní finančných prostriedkov projektom a ktorý prejavil nespokojnosť nad názvom GPS.
Pôvodná predstava bola, že bude vypustených 24 družíc na troch obežných dráhach so sklonom 63 stupňov a výškou 20 200 km. Doba obehu mala byť 12 hodín (presnejšie dva obehy za jeden siderický deň) s pravidelnými dráhami nad terénom, čo malo zaistiť periodický prechod nad riadiacou stanicou umiestnenou na území USA, ktorá bude na družice vysielať údaje o ich obežných dráhach. Tri obežné dráhy boli zvolené preto, aby k zaisteniu chodu systému stačili tri náhradné družice schopné kedykoľvek zaujmuť pozíciu poškodenej družice. Táto konštelácia mala zabezpečiť kedykoľvek viditeľnosť minimálne šiestych družíc a maximálne jedenástich. Tým mala byť zaistená maximálna robustnosť systému.
Neskôr boli prijaté dve zmeny - sklon obežných dráh bol znížený na 55 stupňov a počet obežných dráh bol zvýšený na šesť so štyrmi družicami na každej z nich. Počet družíc vrátane rezervných zostal 24. V prípade potreby je možné systém doplniť o ďalšie družice a zvýšiť tak jeho robustnosť. Bývalý Sovietsky zväz mal so svojimi dopplerovskými systémami družicového navádzania celkom rovnaké problémy ako USA a preto sa nakoniec rozhodli ísť v ďalšom vývoji rovnakou cestou. V sedemdesiatych rokoch bol zahájený vývoj vlastného systému, nesie názov GLONASS, ktorý však využíva prakticky rovnaké princípy, na ktorých je postavený americký systém. Má však niekoľko odlišností. Využíva napríklad o niečo nižšiu obežnú dráhu - 19 100 km. Táto výška bola vybratá spolu s anténou so špeciálnou vyžarovacou charakteristikou, aby bolo vytvorené kompletné rádionavigačné pole kdekoľvek až do výšky 2000 km nad zemským povrchom! Vďaka sklonu obežnej dráhy, ktorý je takmer 65 stupňov (približne rovnaký aký bol plánovaný pre americký systém) je zaistené, že dráha družice nad terénom je každých 17 obehov (8 dní) rovnaká, takže družice systému GLONASS pretínajú rovník len v 17 miestach, vzdialených od seba 21,1 stupňa.
Po konečnom dobudovaní je systém GPS tvorený 24 družicami rozmiestnenými na troch obežných dráhach posunutých navzájom o 120 stupňov. Družice sú na obežných dráhach vzdialené vzájomne o 45 stupňov. Pre zaistenie homogénnejšieho pokrytia územia signálmi z družíc sú družice na jednotlivých obežných dráhach vzájomne posunuté o 15 stupňov. Na každej obežnej dráhe je jedna z družíc prepnutá do pohotovostného režimu a je pripravená okamžite zahájiť plnú prevádzku, pokiaľ sa niektorá z ostatných družíc odmlčí. Plánuje sa, že na každú obežnú dráhu bude umiestnená ešte jedna rezervná družica, čím ich počet vzrastie na 27.
Vzhľadom na to, že dnes sú bežne dostupné iba príjímače pre systém GPS, budeme sa ďalej venovať len tomuto systému. Netreba však zabudnúť, že i systém GLONASS bude v neďalekej budúcnosti zohrávať významnú rolu vo všetkých oblastiach aplikácií družicových polohových systémov.
Na základe dobrých skúseností s dopplerovskými systémami družicovej navigácie bol na počiatku sedemdesiatych rokoch len kúsok k myšlienke vybudovať celkom nový družicový systém, ktorý by umožňoval stanovenie polohy v trojrozmernom priestore spolu s presným časom a sprístupnil by tak družicovú navigáciu i letectvu. Definitívne rozhodnutie o vybudovaní tohto systému padlo 17. Decembra 1973. Od svojho prvopočiatku nesie systém dva názvy GPS a NAVSTAR. Názov NAVSTAR sa niekedy vydáva za skratku názvu NAVigation System with Time And Ranging, ale sám autor projektu sa nad tým len usmieva - tento druhý názov nemá žiadny význam, bol používaný len preto, aby bolo vyhovené vysokému úradníkovi na ministerstve obrany, ktorý rozhodoval o prideľovaní finančných prostriedkov projektom a ktorý prejavil nespokojnosť nad názvom GPS.
Pôvodná predstava bola, že bude vypustených 24 družíc na troch obežných dráhach so sklonom 63 stupňov a výškou 20 200 km. Doba obehu mala byť 12 hodín (presnejšie dva obehy za jeden siderický deň) s pravidelnými dráhami nad terénom, čo malo zaistiť periodický prechod nad riadiacou stanicou umiestnenou na území USA, ktorá bude na družice vysielať údaje o ich obežných dráhach. Tri obežné dráhy boli zvolené preto, aby k zaisteniu chodu systému stačili tri náhradné družice schopné kedykoľvek zaujmuť pozíciu poškodenej družice. Táto konštelácia mala zabezpečiť kedykoľvek viditeľnosť minimálne šiestych družíc a maximálne jedenástich. Tým mala byť zaistená maximálna robustnosť systému.
Neskôr boli prijaté dve zmeny - sklon obežných dráh bol znížený na 55 stupňov a počet obežných dráh bol zvýšený na šesť so štyrmi družicami na každej z nich. Počet družíc vrátane rezervných zostal 24. V prípade potreby je možné systém doplniť o ďalšie družice a zvýšiť tak jeho robustnosť. Bývalý Sovietsky zväz mal so svojimi dopplerovskými systémami družicového navádzania celkom rovnaké problémy ako USA a preto sa nakoniec rozhodli ísť v ďalšom vývoji rovnakou cestou. V sedemdesiatych rokoch bol zahájený vývoj vlastného systému, nesie názov GLONASS, ktorý však využíva prakticky rovnaké princípy, na ktorých je postavený americký systém. Má však niekoľko odlišností. Využíva napríklad o niečo nižšiu obežnú dráhu - 19 100 km. Táto výška bola vybratá spolu s anténou so špeciálnou vyžarovacou charakteristikou, aby bolo vytvorené kompletné rádionavigačné pole kdekoľvek až do výšky 2000 km nad zemským povrchom! Vďaka sklonu obežnej dráhy, ktorý je takmer 65 stupňov (približne rovnaký aký bol plánovaný pre americký systém) je zaistené, že dráha družice nad terénom je každých 17 obehov (8 dní) rovnaká, takže družice systému GLONASS pretínajú rovník len v 17 miestach, vzdialených od seba 21,1 stupňa.
Po konečnom dobudovaní je systém GPS tvorený 24 družicami rozmiestnenými na troch obežných dráhach posunutých navzájom o 120 stupňov. Družice sú na obežných dráhach vzdialené vzájomne o 45 stupňov. Pre zaistenie homogénnejšieho pokrytia územia signálmi z družíc sú družice na jednotlivých obežných dráhach vzájomne posunuté o 15 stupňov. Na každej obežnej dráhe je jedna z družíc prepnutá do pohotovostného režimu a je pripravená okamžite zahájiť plnú prevádzku, pokiaľ sa niektorá z ostatných družíc odmlčí. Plánuje sa, že na každú obežnú dráhu bude umiestnená ešte jedna rezervná družica, čím ich počet vzrastie na 27.
Vzhľadom na to, že dnes sú bežne dostupné iba príjímače pre systém GPS, budeme sa ďalej venovať len tomuto systému. Netreba však zabudnúť, že i systém GLONASS bude v neďalekej budúcnosti zohrávať významnú rolu vo všetkých oblastiach aplikácií družicových polohových systémov.
Kozmický segment:
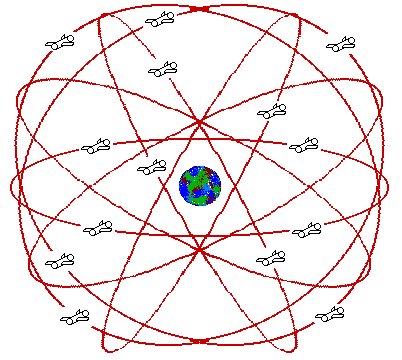
Tento segment je tvorený sústavou družíc, rozmiestnených na obežných dráhach a vysielajúcich navigačné signály. Plná konštelácia GPS pozostáva z 24 družíc: 21 navigačných a troch aktívnych záložných družíc obiehajúcich Zem každých približne 12 hodín. Obežné dráhy majú stálu pozíciu voči Zemi. Výška obežnej dráhy je zvolená tak, že družice opakujú rovnakú dráhu nad povrchom a rovnakú vzájomnú polohu nad daným bodom každých približne 12 hodín. Konštelácia je tvorená šiestimi obežnými dráhami so štyrmi družicami na každej z nich a sklon obežnej dráhy je okolo 55 stupňov vzhľadom k polárnej rovine. Toto usporiadanie poskytuje užívateľom signál zo štyroch až dvanástich družíc na ktoromkoľvek mieste na Zemi. Družice sú vybavené štyrmi atómovými hodinami a akumulátormi, batérie majú k dispozícii solárne panely s plochou 7,2 m2. Každá z družíc váži približne 900 kg.
Riadiaci segment:
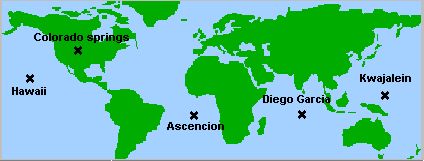
Riadiaci segment je zodpovedný za riadenie celého globálneho polohového systému. Z užívateľského hľadiska je jeho hlavnou úlohou aktualizovať údaje obsiahnuté v družicových navigačných správach. Tento segment je tvorený systémom štyroch monitorovacích pozemných staníc umiestnených okolo celého sveta. V Colorade (USA) na leteckej základni Falcon je umiestnená Hlavná riadiaca stanica. Na mape je rozmiestnenie týchto staníc. Okrem toho systém zahrňuje ešte tri stanice umožňujúce vysielať na družice údaje o ich obežných dráhach a nastavení hodín. Každá družica môže obdržať aktualizované údaje i niekoľkokrát denne. Monitorovacie stanice merajú signály vysielané družicami a získané údaje prenášajú do Hlavnej riadiacej stanice. Tu sú na základe prijatých výsledkov vypočítané presné údaje obežných dráh (tzv. efemeridy) a korekcie hodín pre jednotlivé družice a prenesené na vysielacie stanice. Vysielacie stanice potom minimálne jedenkrát denne vysielajú efemeridy a údaje o nastavení hodín na jednotlivé družice. Tieto družice potom vysielajú prostredníctvom rádiových signálov (družice GPS používajú základnú frekvenciu 10,23 MHz) efemeridy svojich obežných dráh a presný čas do GPS príjímačov.
Užívateľský segment:
Užívateľský segment sa skladá z GPS príjímačov, užívateľov, vyhodnocovacých nástrojov a postupov. GPS príjímače uskutočnia na základe prijatých signálov z družíc predbežné výpočty polohy, rýchlosti a času. Pre výpočet všetkých štyroch súradníc (x, y, z, a t) je potrebné príjmať signály aspoň zo štyroch družíc. Tieto príjímače sú používané pre navigáciu, stanovovanie polohy, meračstvo, stanovovanie presného času ale i pre iné účely. Užívatelia používajú rôzne príjímače GPS, medzi najznámejších výrobcov príjímačov pre geodéziu patrí firma Trinble a Zeiss. Príjímače sa delia na jednofrekvenčné a dvojfrekvenčné. Dvojfrekvenčné majú vyššiu presnosť. Na Slovensku sa využíva GPS na budovanie geodetickej siete SlovGerenet. Navigácia v trojrozmernom priestore je základnou úlohou GPS. Navigačné príjímače sú vyrábané pre lietadlá, lode, pozemné vozidlá, pre kozmické telesá a taktiež v ručnom prevedení. Presné stanovovanie polohy je možné pri použití referenčných príjímačov umiestnených na miestach so známou polohou, ktoré potom umožňujú získať korekciu pre opravu výpočtov z mobilných staníc. Príkladom použitia potom môžu byť meračské práce, vytyčovanie geodetických sietí, meranie súvisiace s tektonikou litosferických dosiek a pod. Ďalším možným použitím GPS je poskytovanie presného časového signálu a prípadne i kmitočtového štandardu. Špeciálne, k tomuto účelu vyvinuté GPS príjímače tak umožňujú pre potreby astronomických observatórií, telekomunikačných zariadení laboratórií všetkého druhu nastaviť presný čas a prípadne i presnú frekvenciu. GPS signály je možné použiť na výskumné účely, napríklad pre štúdium parametrov atmosféry.
Využitie GPS pre navigačné účely:
Aplikácie GPS v oblasti dopravy je možné rozdeliť do dvoch kategórií:Hranica medzi týmito dvoma kategóriami nie je celkom jednoznačná, aplikácie druhej kategórie väčšinou predstavujú kombináciu pasívneho i aktívneho sledovania a ovplyňovania pohybu vozidiel. Väčšinou je možné vysledovať postupný vývoj od pasívneho k aktívnemu sledovaniu.
Signály vysielané družicami:
Dve nosné frekvencie:
1. L1 (1575.42 MHz, vlnová dĺžka 19 cm) - štandardný polohový systém
2. L2 (1227.60 MHz, vlnová dĺžka 24 cm) - presný polohový systém.
Frekvencie sú modulované týmito kódmi:
P a Y kód tvoria základ Presného polohového systému.
Presnosť systému GPS:
Presnosť polohy, ktorá je stanovená GPS sa môže pohybovať od 100 m do niekoľko centimetrov v závislosti na použitom zariadení, použitom spôsobe merania a spracovania výsledkov merania, na aktuálnej politike Ministerstva obrany USA (kódovanie a degradácia presnosti niektorých systémov).
 Medzi významných výrobcov príjímačov pre GPS pre geodetické účely patrí nepochybne i firma Zeiss. Jedným z týchto príjímačov je aj GePoS RD 24. Dokáže vyhodnocovať frekvencie L1 a L2. Presnosť tohto prístroja je 5 mm. Energiu mu dodávajú 6V batérie. Jednotlivé merania sa ukladajú do jeho pamäte, ktorú predstavujú PCMCIA karty s kapacitou od 1 do 10 MB.
Medzi významných výrobcov príjímačov pre GPS pre geodetické účely patrí nepochybne i firma Zeiss. Jedným z týchto príjímačov je aj GePoS RD 24. Dokáže vyhodnocovať frekvencie L1 a L2. Presnosť tohto prístroja je 5 mm. Energiu mu dodávajú 6V batérie. Jednotlivé merania sa ukladajú do jeho pamäte, ktorú predstavujú PCMCIA karty s kapacitou od 1 do 10 MB.
Rozmery: 215 x 245 x 135 mm
Váha: 2,9 kg
Okrem príjímačov GPS pre geodéziu, existujú aj rôzne príjímače pre širokú verejnosť. V poslednej dobe sa začínajú rozširovať príjímače pre bežného používateľa, ktoré mu poskytujú informácie o jeho polohe. Nie príliš vysoká presnosť týchto prístrojov (rádovo desiatky metrov) umožnila ich cenovú dostupnosť (vzhľadom na veľmi presné geodetické prístroje).
Casio GPS watch:
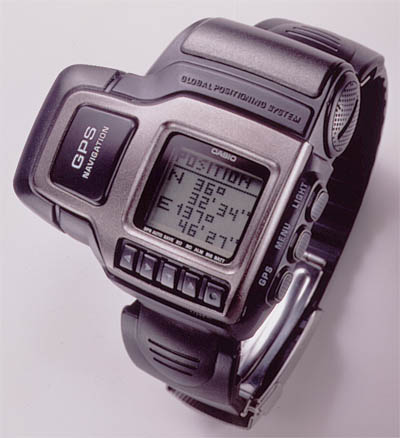 Firma Casio uviedla na trh 8. Januára 1999 špeciálny GPS príjímač vo veľkosti náramkových hodiniek. Tieto hodinky sú skutočne veľmi užitočné, oznámia Vám polohu, kde sa práve nachádzate, zaznamenajú Vašu cestu, prípadne Vás budú viesť tam, kam ich naprogramujete.
Na displeji hodiniek môžeme nájsť dátum, deň v týždni, hodiny, minúty, sekundy, AM/PM. Je tiež zabezpečená automatická korekcia času podľa údajov z GPS (atómové hodiny na každej družici), časová korekcia podľa časového pásma, letný/zimný čas. Ďalej alarm a dvojsekundové podsvietenie displeja po aktivácii. Baterka však bohužiaľ vydrží približne na 600 určení polohy.
Firma Casio uviedla na trh 8. Januára 1999 špeciálny GPS príjímač vo veľkosti náramkových hodiniek. Tieto hodinky sú skutočne veľmi užitočné, oznámia Vám polohu, kde sa práve nachádzate, zaznamenajú Vašu cestu, prípadne Vás budú viesť tam, kam ich naprogramujete.
Na displeji hodiniek môžeme nájsť dátum, deň v týždni, hodiny, minúty, sekundy, AM/PM. Je tiež zabezpečená automatická korekcia času podľa údajov z GPS (atómové hodiny na každej družici), časová korekcia podľa časového pásma, letný/zimný čas. Ďalej alarm a dvojsekundové podsvietenie displeja po aktivácii. Baterka však bohužiaľ vydrží približne na 600 určení polohy.
Rozmery:
Displej : 17,5x20,8mm
Komplet : 64,7x65,8x29mm Váha : 148g
 Existujú však aj ďalšie príjímače, ktoré sú však o niečo väčšie ako Casio GPS watch, ale tiež poskytujú viac možností a dlhšiu prevádzku.
Existujú však aj ďalšie príjímače, ktoré sú však o niečo väčšie ako Casio GPS watch, ale tiež poskytujú viac možností a dlhšiu prevádzku.
 Naša škola vlastní GPS príjímač s relatívnou presnosťou niekoľko metrov. Tento príjímač je vyrobený americkou firmou Garmin Corporation. Slúži ako názorná pomôcka pri výučbe tématického celku Družicové polohové systémy v 3.ročníku na predmete geodézia.
Naša škola vlastní GPS príjímač s relatívnou presnosťou niekoľko metrov. Tento príjímač je vyrobený americkou firmou Garmin Corporation. Slúži ako názorná pomôcka pri výučbe tématického celku Družicové polohové systémy v 3.ročníku na predmete geodézia.